Abstract
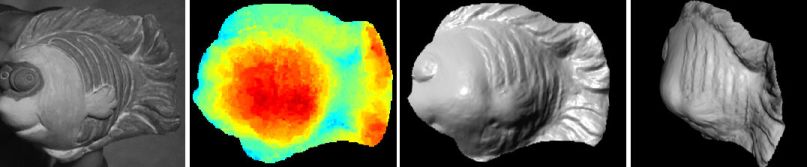
We address the problem of reconstructing the 3-D shape of a Lambertian surface from multiple images acquired as an object rotates under distant and possibly varying illumination. From camera projection matrices estimated from point correspondences across views, the algorithm computes a dense correspondence map by minimizing a multi-ocular photometric constraint. Once correspondence across views is established, photometric stereo is applied to estimate a surface normal field and 3-D shape. Conceptually, the algorithm merges multi-view stereo and photometric stereo and uses aspects of both methods to recover shape. The method is straightforward to implement and relies on established principles from the two stereo methods. We empirically validate the method on images of a number of objects and show that it outperforms previous methods.
Paper
Poster